


Ang pangunahing teorya ng pagpapatakbo para sa mga motor na walang brush na servo ay umiikot sa mga prinsipyo ng magnetism kung saan ang mga pole ay nagtataboy at ang mga magkasalungat na pole ay umaakit. Mayroong dalawang magnetic source na matatagpuan sa loob ng isang servo motor: Mga permanenteng magnet na karaniwang matatagpuan sa rotor ng motor, at ang nakatigil na electromagnet na pumapalibot sa rotor. Ang electromagnet ay tinatawag na alinman sa stator o motor winding at binubuo ng mga plate na bakal na tinatawag na mga lamination, na pinagsama-sama. Ang mga bakal na plato ay karaniwang may "mga ngipin" na nagpapahintulot sa isang tansong kawad na masugatan sa kanilang paligid.
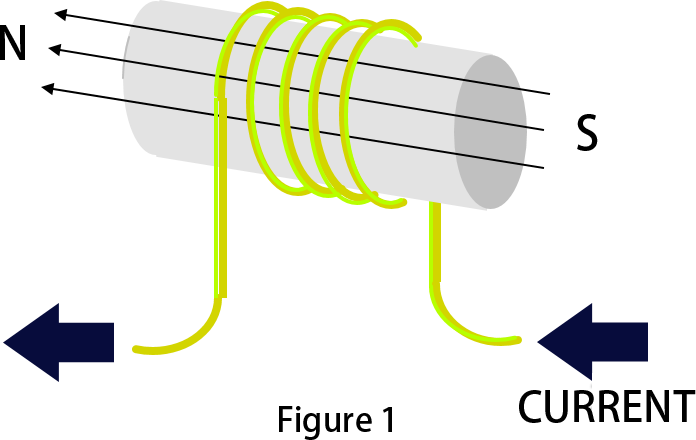
Bumalik sa mga prinsipyo ng magnetism, kapag ang isang konduktor tulad ng isang tansong wire ay nabuo sa isang likid, at ang konduktor ay pinalakas upang ang kasalukuyang daloy sa pamamagitan nito, isang magnetic field ay nilikha.
Ang magnetic field na ito na nilikha ng kasalukuyang dumadaan sa konduktor ay magkakaroon ng north pole at south pole. Sa pamamagitan ng mga magnetic pole na matatagpuan sa stator (kapag pinalakas) at sa mga permanenteng magnet ng rotor, paano ka lumikha ng isang estado ng magkasalungat na mga pole na umaakit at tulad ng mga pole na nagtataboy?
Ang susi ay upang baligtarin ang kasalukuyang dumadaan sa electromagnet. Kapag ang kasalukuyang dumadaloy sa isang conducting coil sa isang direksyon, ang mga pole sa hilaga at timog ay nalilikha.

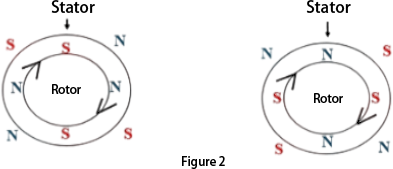
Kapag binago ang direksyon ng agos, ang mga poste ay binabaligtad kaya ang dating north pole ay ngayon ay south pole at vice versa. Ang Figure 1 ay nagbibigay ng pangunahing paglalarawan kung paano ito gumagana. Sa figure 2, ang imahe sa kaliwa ay nagpapakita ng isang kondisyon kung saan ang mga pole ng rotor magnets ay naaakit sa mga kabaligtaran na pole ng stator. Ang mga rotor pole, na nakakabit sa motor shaft, ay iikot hanggang sa sila ay nakahanay sa mga kabaligtaran na pole ng stator. Kung ang lahat ay nanatiling pareho ang rotor ay mananatiling nakatigil.
Ang larawan sa kanan sa figure 2 ay nagpapakita kung paano nabaligtad ang mga stator pole. Mangyayari ito sa tuwing naabutan ng rotor pole ang kabaligtaran na poste ng stator sa pamamagitan ng pagbaligtad sa kasalukuyang daloy sa partikular na lokasyon ng stator. Ang patuloy na pag-flip ng mga stator pole ay lumilikha ng isang kondisyon kung saan ang mga permanenteng magnet pole ng rotor ay palaging "hinahabol" ang kanilang stator opposites na nagreresulta sa patuloy na pag-ikot ng rotor/motor shaft.
Ang pag-flip ng mga stator pole ay kilala bilang commutation. Ang pormal na kahulugan ng commutation ay "Ang pagkilos ng mga steering currents sa tamang mga phase ng motor upang makabuo ng pinakamainam na motor torque at motor shaft rotation". Paano pinapatakbo ang mga alon sa tamang oras upang mapanatili ang pag-ikot ng baras?
Ang pagpipiloto ay ginagawa ng inverter o drive na nagpapagana sa motor. Kapag ang isang drive ay ginagamit sa isang partikular na motor isang offset anggulo ay natukoy sa drive software kasama ng iba pang mga bagay tulad ng motor inductance, resistensya, at iba pang mga parameter. Ang feedback device na ginagamit sa motor (encoder, solver, atbp.) ay nagbibigay ng posisyon ng rotor shaft/magnetic pole sa drive.
Kapag ang magnetic pole position ng rotor ay tumugma sa offset angle, babaligtarin ng drive ang kasalukuyang dumadaan sa stator coil at sa gayon ay babaguhin ang stator pole mula hilaga hanggang timog at mula timog hanggang hilaga tulad ng ipinapakita sa Figure 2. Mula dito makikita mo na ang pagpapahintulot sa mga poste na mag-align ay titigil sa pag-ikot ng baras ng motor, o ang pagpapalit ng pagkakasunud-sunod ay magpapaikot ng baras sa isang direksyon kumpara sa isa pa, at ang pagpapalit ng mga ito ay mabilis na nagbibigay-daan para sa isang mabilis na pag-ikot o ang kabaligtaran lamang para sa mabagal na pag-ikot ng baras.






